import numpy as np
import matplotlib.pyplot as plt
from mpl_toolkits.mplot3d.proj3d import proj_transform
from mpl_toolkits.mplot3d.axes3d import Axes3D
from matplotlib.text import Annotation
from matplotlib.patches import FancyArrowPatch
import matplotlib.patches as mpatches
class Annotation3D(Annotation):
def __init__(self, text, xyz, *args, **kwargs):
super().__init__(text, xy=(0,0), *args, **kwargs)
self._xyz = xyz
def draw(self, renderer):
x2, y2, z2 = proj_transform(*self._xyz, renderer.M)
self.xy=(x2,y2)
super().draw(renderer)
def _annotate3D(ax,text, xyz, *args, **kwargs):
'''Add anotation `text` to an `Axes3d` instance.'''
annotation= Annotation3D(text, xyz, *args, **kwargs)
ax.add_artist(annotation)
setattr(Axes3D,'annotate3D',_annotate3D)
class Arrow3D(FancyArrowPatch):
def __init__(self, x, y, z, dx, dy, dz, *args, **kwargs):
super().__init__((0,0), (0,0), *args, **kwargs)
self._xyz = (x,y,z)
self._dxdydz = (dx,dy,dz)
def draw(self, renderer):
x1,y1,z1 = self._xyz
dx,dy,dz = self._dxdydz
x2,y2,z2 = (x1+dx,y1+dy,z1+dz)
xs, ys, zs = proj_transform((x1,x2),(y1,y2),(z1,z2), renderer.M)
self.set_positions((xs[0],ys[0]),(xs[1],ys[1]))
super().draw(renderer)
def _arrow3D(ax, x, y, z, dx, dy, dz, *args, **kwargs):
'''Add an 3d arrow to an `Axes3D` instance.'''
arrow = Arrow3D(x, y, z, dx, dy, dz, *args, **kwargs)
ax.add_artist(arrow)
setattr(Axes3D,'arrow3D',_arrow3D)
jp_score = np.array([49, 58, 64, 65, 54, 58, 49, 67, 54, 66, 72, 66, 54, 64, 39,
56, 54, 56, 48, 57, 57, 47, 50, 60, 72, 54, 59, 61, 64, 70])
math_score = np.array([51, 58, 56, 70, 45, 70, 45, 69, 66, 73, 71, 72, 57, 53, 58,
57, 71, 63, 53, 62, 62, 59, 57, 65, 74, 66, 72, 50, 69, 60])
en_score = np.array([59, 63, 68, 77, 55, 71, 57, 79, 66, 81, 81, 77, 62, 67, 56,
62, 70, 67, 61, 70, 68, 59, 61, 71, 77, 66, 70, 59, 68, 71])
mean_vector = np.array([jp_score.mean(), math_score.mean(), en_score.mean()])
data_matrix = np.c_[jp_score, math_score, en_score]
data_mean_reduced = data_matrix - mean_vector
covariance_matrix = np.dot(data_mean_reduced.T, data_mean_reduced) / len(jp_score)
eigen_values, eigen_vectors = np.linalg.eig(covariance_matrix)
sorted_index = eigen_values.argsort()[::-1]
eigen_values=eigen_values[sorted_index]
eigen_vectors=eigen_vectors[:, sorted_index]
eigen_values, eigen_vectors = np.linalg.eig(covariance_matrix)
sorted_idx = eigen_values.argsort()[::-1]
eigen_values = eigen_values[sorted_idx]
eigen_vectors = eigen_vectors[:,sorted_idx]
eigen_vectors = eigen_vectors.astype(float)
subject_labels = ['Japanese score deviation', 'Math score deviation', 'English score deviation']
const_range = 2
X = np.arange(-const_range, const_range + 1, 1)
Y = np.arange(-const_range, const_range + 1, 1)
Z = np.arange(-const_range, const_range + 1, 1)
U_x, U_y, U_z = np.meshgrid(X, Y, Z)
V_x = np.zeros((len(U_x), len(U_y), len(U_z)))
V_y = np.zeros((len(U_x), len(U_y), len(U_z)))
V_z = np.zeros((len(U_x), len(U_y), len(U_z)))
temp_vec = np.zeros((1, 3))
W_x = np.zeros((len(U_x), len(U_y), len(U_z)))
W_y = np.zeros((len(U_x), len(U_y), len(U_z)))
W_z = np.zeros((len(U_x), len(U_y), len(U_z)))
fig = plt.figure(figsize=(15, 15))
grid_range = 15
for idx in range(2):
if idx ==0:
ax = fig.add_subplot(1, 2, idx + 1, projection='3d')
for i in range(len(U_x)):
for j in range(len(U_x)):
for k in range(len(U_x)):
temp_vec[0][0] = U_x[i][j][k]
temp_vec[0][1] = U_y[i][j][k]
temp_vec[0][2] = U_z[i][j][k]
temp_vec[0] = np.dot(covariance_matrix, temp_vec[0])
V_x[i][j][k] = temp_vec[0][0]
V_y[i][j][k] = temp_vec[0][1]
V_z[i][j][k] = temp_vec[0][2]
W_x[i][j][k] = (V_x[i][j][k] - U_x[i][j][k]) / (2*grid_range)
W_y[i][j][k] = (V_y[i][j][k] - U_y[i][j][k]) / (2*grid_range)
W_z[i][j][k] = (V_z[i][j][k] - U_z[i][j][k]) / (2*grid_range)
ax.arrow3D(0, 0, 0,
U_x[i][j][k], U_y[i][j][k], U_z[i][j][k],
mutation_scale=10, arrowstyle="-|>", fc='dimgrey', ec='dimgrey')
#ax.arrow3D(0, 0, 0,
# V_x[i][j][k], V_y[i][j][k], V_z[i][j][k],
# mutation_scale=10, arrowstyle="-|>", fc='red', ec='red')
ax.arrow3D(U_x[i][j][k], U_y[i][j][k], U_z[i][j][k],
W_x[i][j][k], W_y[i][j][k], W_z[i][j][k],
mutation_scale=10, arrowstyle="-|>", fc='darkviolet', ec='darkviolet')
if idx==1:
ax = fig.add_subplot(1, 2, idx + 1, projection='3d')
ax.scatter(data_mean_reduced[:, 0], data_mean_reduced[:, 1], data_mean_reduced[:, 2], marker='o', s=80)
ax.arrow3D(0, 0, 0, eigen_vectors.T[0][0]*10, eigen_vectors.T[0][1]*10, eigen_vectors.T[0][2]*10,
mutation_scale=10, arrowstyle="-|>", fc='orange', ec='orange', lw = 3)
ax.arrow3D(0, 0, 0, eigen_vectors.T[1][0]*10, eigen_vectors.T[1][1]*10, eigen_vectors.T[1][2]*10,
mutation_scale=10, arrowstyle="-|>", fc='orange', ec='orange', lw = 3)
ax.arrow3D(0, 0, 0, eigen_vectors.T[2][0]*10, eigen_vectors.T[2][1]*10, eigen_vectors.T[2][2]*10,
mutation_scale=10, arrowstyle="-|>", fc='orange', ec='orange', lw = 3)
ax.text(eigen_vectors.T[0][0]*8 , eigen_vectors.T[0][1]*8, eigen_vectors.T[0][2]*8+1, r'$u_1$', fontsize=20)
ax.text(eigen_vectors.T[1][0]*8 , eigen_vectors.T[1][1]*8, eigen_vectors.T[1][2]*8, r'$u_2$', fontsize=20)
ax.text(eigen_vectors.T[2][0]*8 , eigen_vectors.T[2][1]*8, eigen_vectors.T[2][2]*8, r'$u_3$', fontsize=20)
ax.set_xlim(-grid_range, grid_range)
ax.set_ylim(-grid_range, grid_range)
ax.set_zlim(-grid_range, grid_range)
#ax.set_xlabel(r'$x_1$', fontsize=25)
#ax.set_ylabel(r'$x_2$', fontsize=25)
#ax.set_zlabel(r'$x_3$', fontsize=25)
ax.set_xlabel(subject_labels[0], fontsize=10)
ax.set_ylabel(subject_labels[1], fontsize=10)
ax.set_zlabel(subject_labels[2], fontsize=10)
#lt.savefig("visualizing_covariance_matrix.png")
plt.show()
 is a certain type of
is a certain type of  matrix, the formula of a D-dimensional ellipsoid whose center is identical to the origin point is as follows:
matrix, the formula of a D-dimensional ellipsoid whose center is identical to the origin point is as follows:  , where
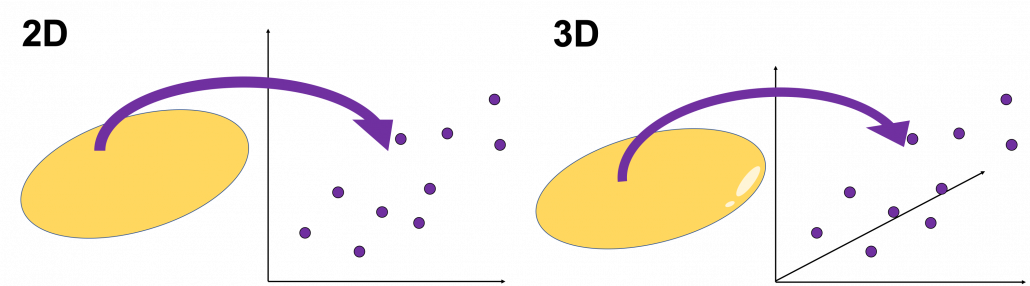
, where  . As is always the case with formulas in data science, you can visualize such ellipsoids if you are talking about 1, 2, or 3 dimensional data like in the figure below, but in general D-dimensional space, it is theoretical/imaginary stuff on blackboards.
. As is always the case with formulas in data science, you can visualize such ellipsoids if you are talking about 1, 2, or 3 dimensional data like in the figure below, but in general D-dimensional space, it is theoretical/imaginary stuff on blackboards.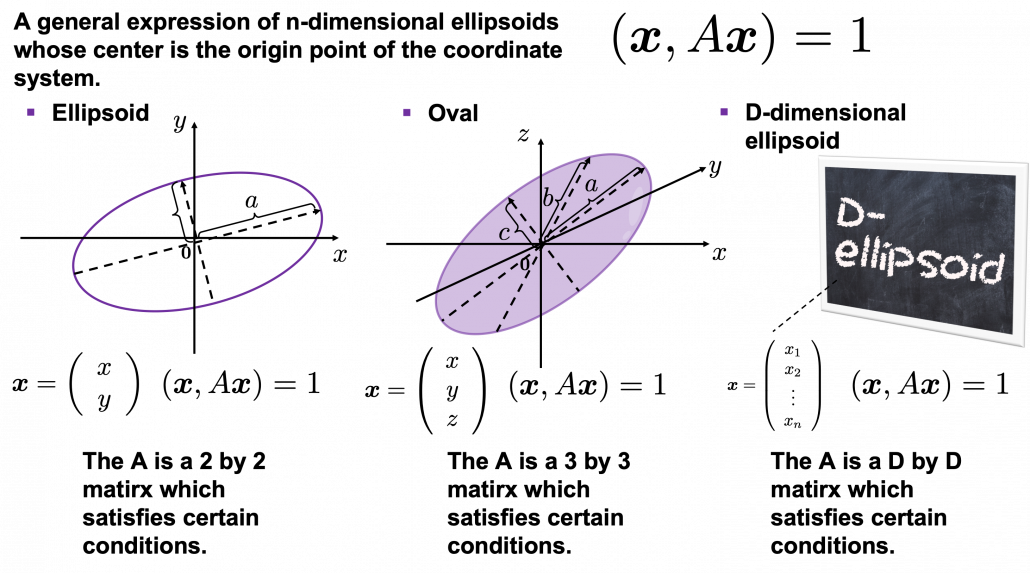
 , where
, where  or
or  , where
, where  . These are special cases of the equation
. These are special cases of the equation  . In this case the axes of ellipsoids the same as those of the coordinate system. Thus in this simple case,
. In this case the axes of ellipsoids the same as those of the coordinate system. Thus in this simple case,  or
or  .
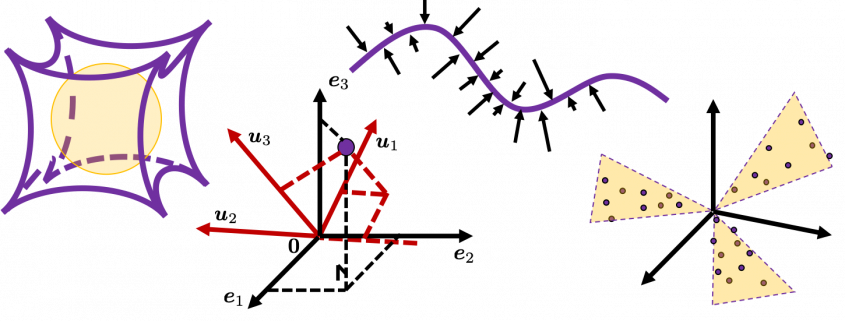
. as below (The samples are plotted in purple). Intuitively, the data “swell” the most along the vector
as below (The samples are plotted in purple). Intuitively, the data “swell” the most along the vector  . Also it is clear that
. Also it is clear that  is the only vector orthogonal to
is the only vector orthogonal to  expresses the data in a better way, and you you can get new coordinate points of the samples by projecting them on new axes as done with yellow lines below.
expresses the data in a better way, and you you can get new coordinate points of the samples by projecting them on new axes as done with yellow lines below.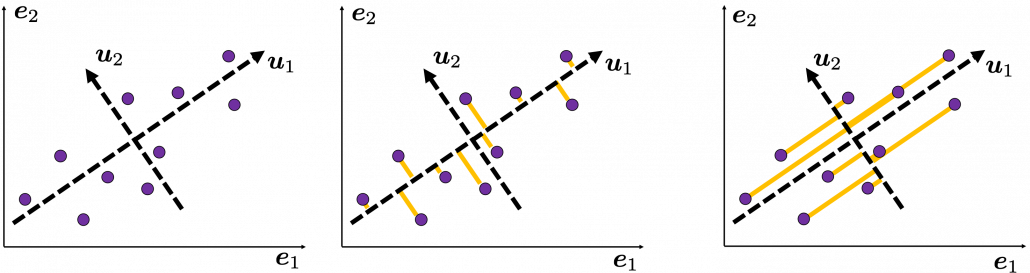
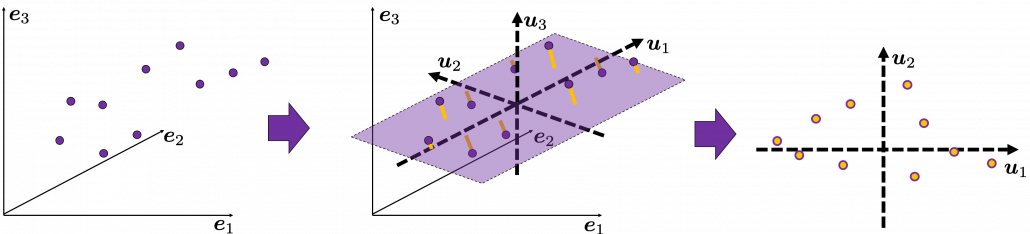
 as below, the data “swell” the most also along
as below, the data “swell” the most also along  .
.
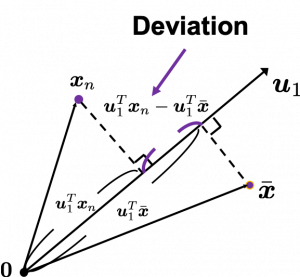
 on the axis
on the axis  .
. is the mean of data in the original coordinate, then the deviation of
is the mean of data in the original coordinate, then the deviation of  on the axis
on the axis  , as shown in the figure. Hence the variance, I mean the mean of the deviation on is
, as shown in the figure. Hence the variance, I mean the mean of the deviation on is  , where
, where  is the total number of data points. After some deformations, you get the next equation
is the total number of data points. After some deformations, you get the next equation  , where
, where  .
.  is known as a covariance matrix.
is known as a covariance matrix. , and for mathematical derivation we need some college level calculus, so if that is too much for you, you can skip reading this part till the next section.
, and for mathematical derivation we need some college level calculus, so if that is too much for you, you can skip reading this part till the next section. including
including  . Introducing a
. Introducing a  . In conclusion
. In conclusion  satisfies
satisfies  . If you have read my last article on eigenvectors, you wold soon realize that this is an equation for calculating eigenvectors, and that means
. If you have read my last article on eigenvectors, you wold soon realize that this is an equation for calculating eigenvectors, and that means  . We have seen that
. We have seen that  is a the variance of data when projected on a vector
is a the variance of data when projected on a vector  is the biggest variance possible when the data are projected on a vector.
is the biggest variance possible when the data are projected on a vector. , and it it the second biggest variance possible, and in this case the date are projected on
, and it it the second biggest variance possible, and in this case the date are projected on 
 matrix
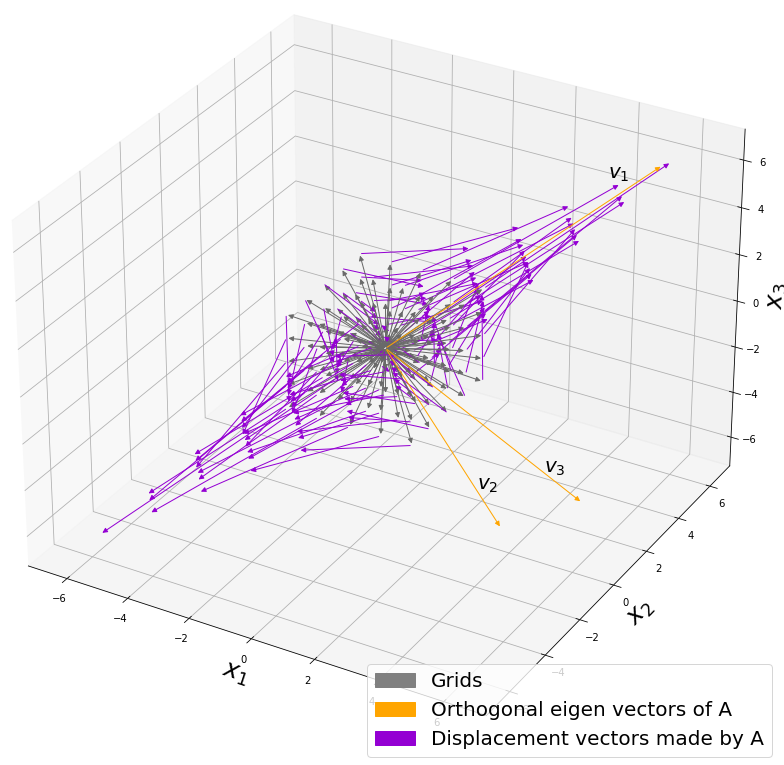
matrix  , and in fact the matrix is just a constant multiplication of this covariance matrix. I think now you understand that PCA is calculating the orthogonal eigenvectors of covariance matrix of data, that is diagonalizing covariance matrix with orthonormal eigenvectors. Hence we can guess that covariance matrix enables a type of linear transformation of rotation and expansion and contraction of vectors. And data points swell along eigenvectors of such matrix.
, and in fact the matrix is just a constant multiplication of this covariance matrix. I think now you understand that PCA is calculating the orthogonal eigenvectors of covariance matrix of data, that is diagonalizing covariance matrix with orthonormal eigenvectors. Hence we can guess that covariance matrix enables a type of linear transformation of rotation and expansion and contraction of vectors. And data points swell along eigenvectors of such matrix.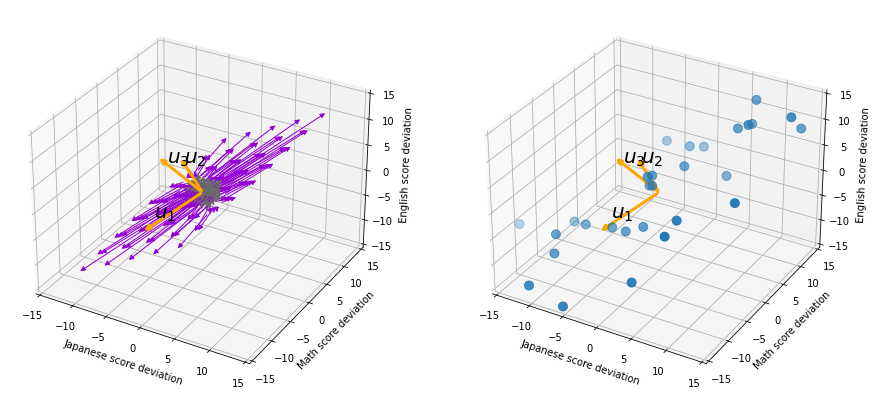
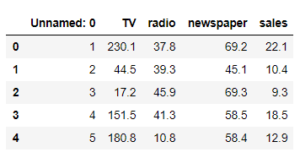
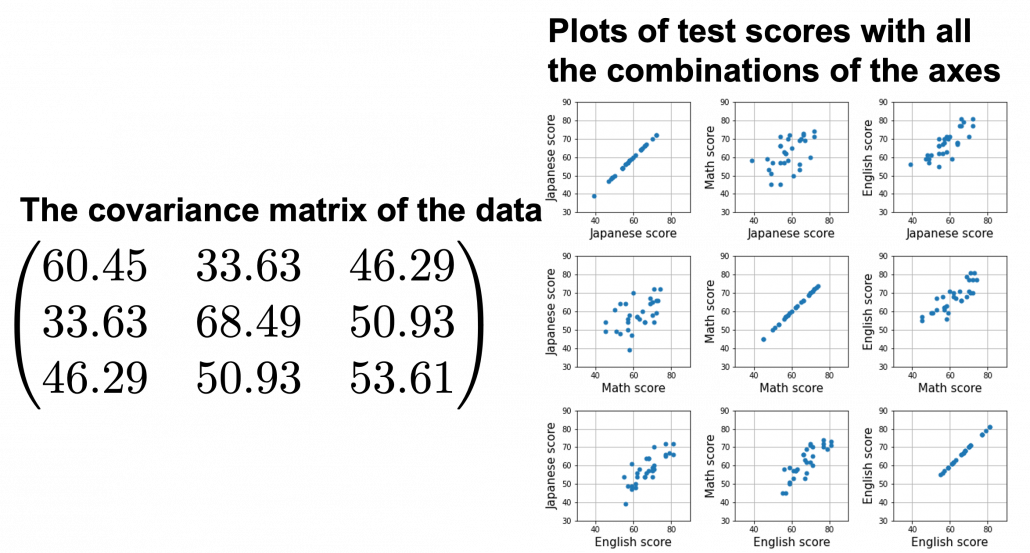
 denote Japanese, Math, English scores respectively. The mean of the data is
denote Japanese, Math, English scores respectively. The mean of the data is  , and the covariance matrix of data in the original coordinate system is
, and the covariance matrix of data in the original coordinate system is  . The eigenvalues of
. The eigenvalues of  are
are  , and
, and  , and their corresponding unit eigenvectors are
, and their corresponding unit eigenvectors are  respectively.
respectively.  is an orthonormal matrix, where
is an orthonormal matrix, where  . As I explained in the last article, you can diagonalize
. As I explained in the last article, you can diagonalize  :
:  .
. .
. means. Each element of
means. Each element of  denotes coordinate of the data point
denotes coordinate of the data point  , and
, and  ).
).  enables a rotation of a rigid body, which means the shape or arrangement of data will not change after the rotation, and
enables a rotation of a rigid body, which means the shape or arrangement of data will not change after the rotation, and  , and
, and  is the coordinate of
is the coordinate of  denotes the coordinate point of the purple point in the red coordinate system.
denotes the coordinate point of the purple point in the red coordinate system.  denotes the coordinates of data projected on new axes
denotes the coordinates of data projected on new axes  , which are unit eigenvectors of
, which are unit eigenvectors of 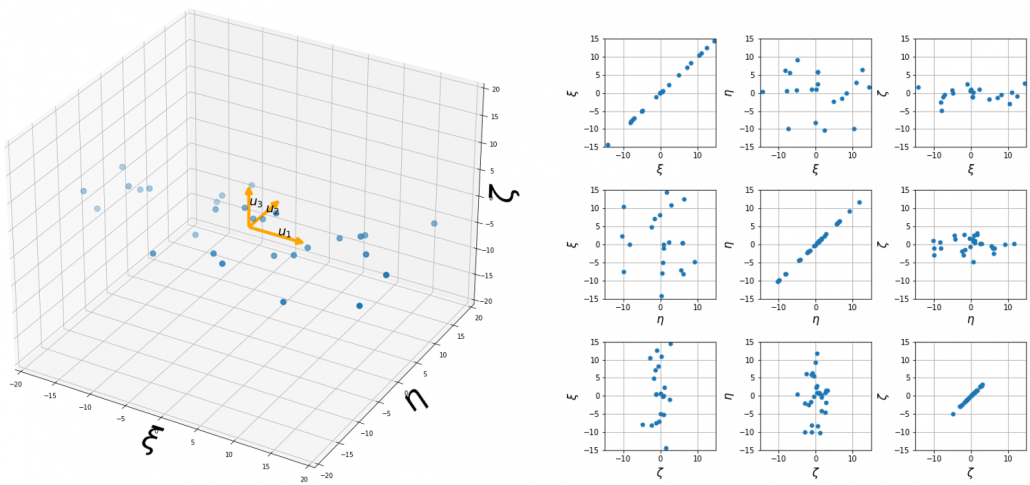
 , which means you can express deviations of the original data as linear combinations of the three factors
, which means you can express deviations of the original data as linear combinations of the three factors  , and
, and  . We expect that those three factors contain keys for understanding the original data more efficiently. If you concretely write down all the equations for the factors:
. We expect that those three factors contain keys for understanding the original data more efficiently. If you concretely write down all the equations for the factors:  ,
,  , and
, and  . If you examine the coefficients of the deviations
. If you examine the coefficients of the deviations  , and
, and  , we can observe that
, we can observe that  almost equally reflects the deviation of the scores of all the subjects, thus we can say
almost equally reflects the deviation of the scores of all the subjects, thus we can say  is
is  . You can see
. You can see  , where
, where  . The variance of data projected on new D-dimensional coordinate system is
. The variance of data projected on new D-dimensional coordinate system is 




 . This means that in the new coordinate system after PCA, covariances between any pair of variants are all zero.
. This means that in the new coordinate system after PCA, covariances between any pair of variants are all zero. .
. from the reduced two dimensional coordinate system
from the reduced two dimensional coordinate system  . Then it mathematically clearer that we can express the data with two factors: “how smart the student is” and “whether he is at scientific side or liberal art side.”
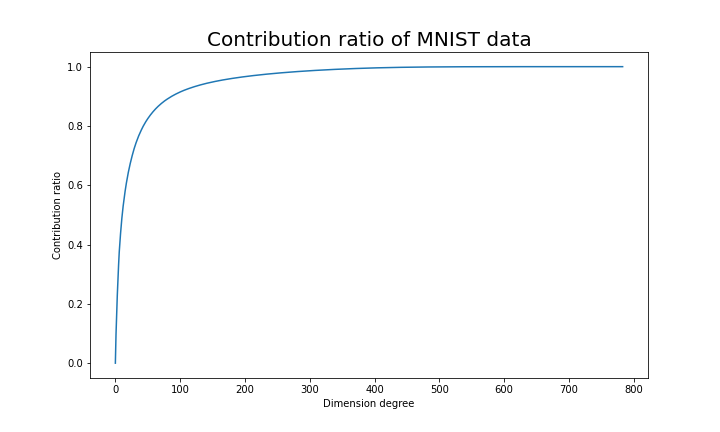
. Then it mathematically clearer that we can express the data with two factors: “how smart the student is” and “whether he is at scientific side or liberal art side.” is a statistic which indicates how much the corresponding
is a statistic which indicates how much the corresponding  is called the contribution ratio of eigenvector
is called the contribution ratio of eigenvector  and
and  are respectively
are respectively  ,
,  ,
,  . You can decide how many degrees of dimensions you reduce based on this information.
. You can decide how many degrees of dimensions you reduce based on this information.

 be a vector space and let
be a vector space and let  be a mapping of
be a mapping of  into itself, defined as
into itself, defined as  , where
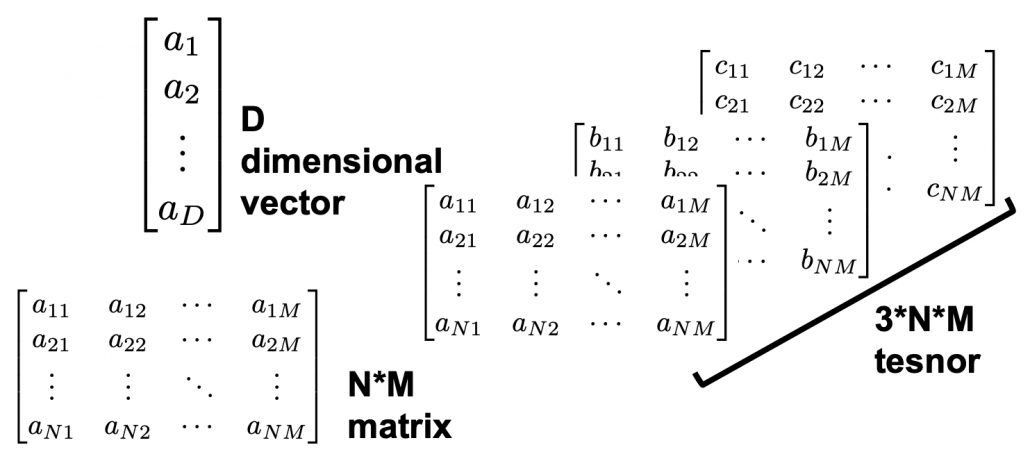
, where  is
is  dimensional vector. An element
dimensional vector. An element  is called an eigen vector if there exists a number
is called an eigen vector if there exists a number  such that
such that  and
and  . In this case
. In this case  , belonging to
, belonging to  . If
. If  is basis of the vector space
is basis of the vector space  matrices
matrices  , whose column vectors are eigen vectors
, whose column vectors are eigen vectors  , where
, where  .
. Most textbooks keep explaining these type of stuff, but I have to say they lack efforts to make it understandable to readers with low mathematical literacy like me. Especially if you have to apply the idea to data science field, I believe you need more visual understanding of diagonalization. Therefore instead of just explaining the definitions and theorems, I would like to take a different approach. But in order to understand them in more intuitive ways, we first have to rethink waht linear transformation
Most textbooks keep explaining these type of stuff, but I have to say they lack efforts to make it understandable to readers with low mathematical literacy like me. Especially if you have to apply the idea to data science field, I believe you need more visual understanding of diagonalization. Therefore instead of just explaining the definitions and theorems, I would like to take a different approach. But in order to understand them in more intuitive ways, we first have to rethink waht linear transformation  means in more visible ways.
means in more visible ways. is a vector transformed by
is a vector transformed by 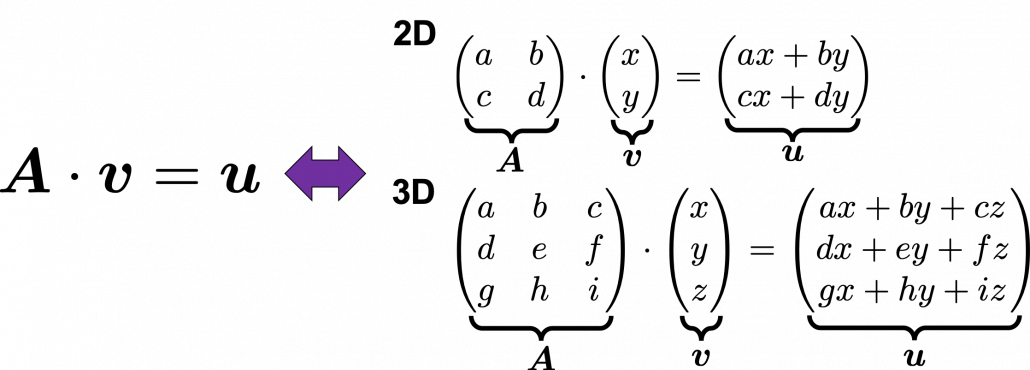 *I am not going to use the term “linear transformation” in a precise way in the context of linear algebra. In this article or in the context of data science or machine learning, “linear transformation” for the most part means products of matrices or vectors.
*I am not going to use the term “linear transformation” in a precise way in the context of linear algebra. In this article or in the context of data science or machine learning, “linear transformation” for the most part means products of matrices or vectors. 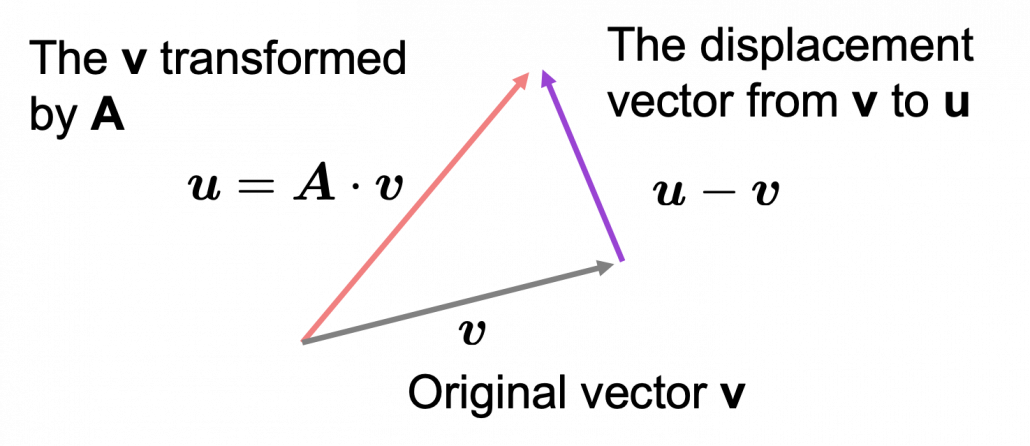 Let’s calculate the displacement vector with more vectors
Let’s calculate the displacement vector with more vectors  , and I prepared several grid vectors
, and I prepared several grid vectors  , which are in purple.
, which are in purple. square matrices
square matrices  , and I plotted displace vectors made by the matrices respectively in the figure below.
, and I plotted displace vectors made by the matrices respectively in the figure below. , the matrix does not have any real eigan values.
, the matrix does not have any real eigan values. is classified to, and I am going to explain positive semidefinite matrices in the fourth section.
is classified to, and I am going to explain positive semidefinite matrices in the fourth section.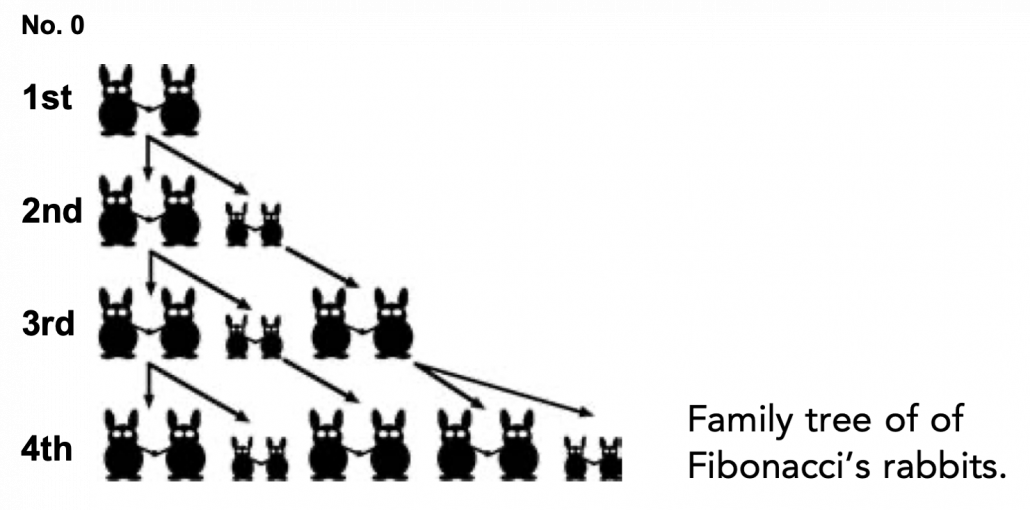
 be the number of pairs of grown up rabbits in the
be the number of pairs of grown up rabbits in the  generation. One pair of grown up rabbits produce one pair of young rabbit The concrete values of
generation. One pair of grown up rabbits produce one pair of young rabbit The concrete values of  are
are  ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  . Assume that
. Assume that  and that
and that  , then you can calculate the number of the pairs of grown up rabbits in the next generation with the following recurrence relation.
, then you can calculate the number of the pairs of grown up rabbits in the next generation with the following recurrence relation.  .Let
.Let  be
be  , then the recurrence relation can be written as
, then the recurrence relation can be written as  , and the transition of
, and the transition of 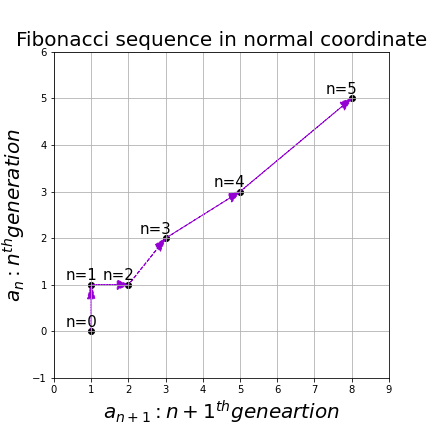
 are eigen values of
are eigen values of  scalars such that
scalars such that  . According to the definition of eigen values and eigen vectors belonging to them, the following two equations hold:
. According to the definition of eigen values and eigen vectors belonging to them, the following two equations hold:  . If you calculate
. If you calculate  is, using eigen vectors of
is, using eigen vectors of  . In the same way,
. In the same way,  , and
, and  . These equations show that in coordinate system made by eigen vectors of
. These equations show that in coordinate system made by eigen vectors of 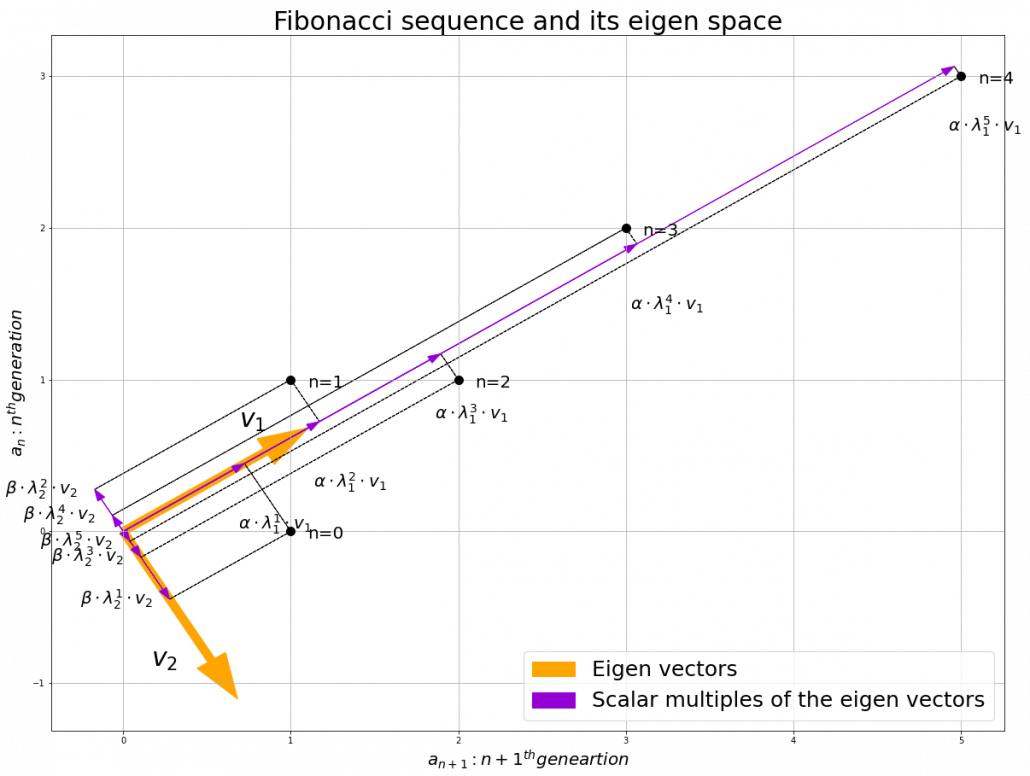
 for all values of the vector
for all values of the vector  for all the eigen values
for all the eigen values  .
. for all values of the vector
for all values of the vector  square positive semidefinite matrix
square positive semidefinite matrix  , whose linear transformation I visualized the second section, is also positive semidefinite.
, whose linear transformation I visualized the second section, is also positive semidefinite. .
.
 , there exist orthonormal matrices
, there exist orthonormal matrices  , where
, where  .
. , where
, where  . In other words column vectors
. In other words column vectors  form an orthonormal coordinate system.
form an orthonormal coordinate system. . Combining this fact with what I have told you so far, you we can reach one conclusion: you can orthogonalize a real symmetric matrix
. Combining this fact with what I have told you so far, you we can reach one conclusion: you can orthogonalize a real symmetric matrix  . This is known as spectral decomposition or singular value decomposition.
. This is known as spectral decomposition or singular value decomposition. is also orthonormal. In other words, assume
is also orthonormal. In other words, assume  ,
,  also forms a orthonormal coordinate system.
also forms a orthonormal coordinate system. expands or contracts vectors along each axis. I am going to explain that more precisely in the upcoming articles.
expands or contracts vectors along each axis. I am going to explain that more precisely in the upcoming articles.
 , then
, then  is a variant, and
is a variant, and  are parameters. In case of classical machine learning algorithms, the number of those parameters are very limited because they were originally designed manually. Such functions for classical machine learning is useful for features found by humans, after trial and errors(feature engineering is a field of finding such effective features, manually). You adjust those parameters based on how different the outputs(estimated outcome of classification/regression) are from supervising vectors(the data prepared to show ideal answers).
are parameters. In case of classical machine learning algorithms, the number of those parameters are very limited because they were originally designed manually. Such functions for classical machine learning is useful for features found by humans, after trial and errors(feature engineering is a field of finding such effective features, manually). You adjust those parameters based on how different the outputs(estimated outcome of classification/regression) are from supervising vectors(the data prepared to show ideal answers).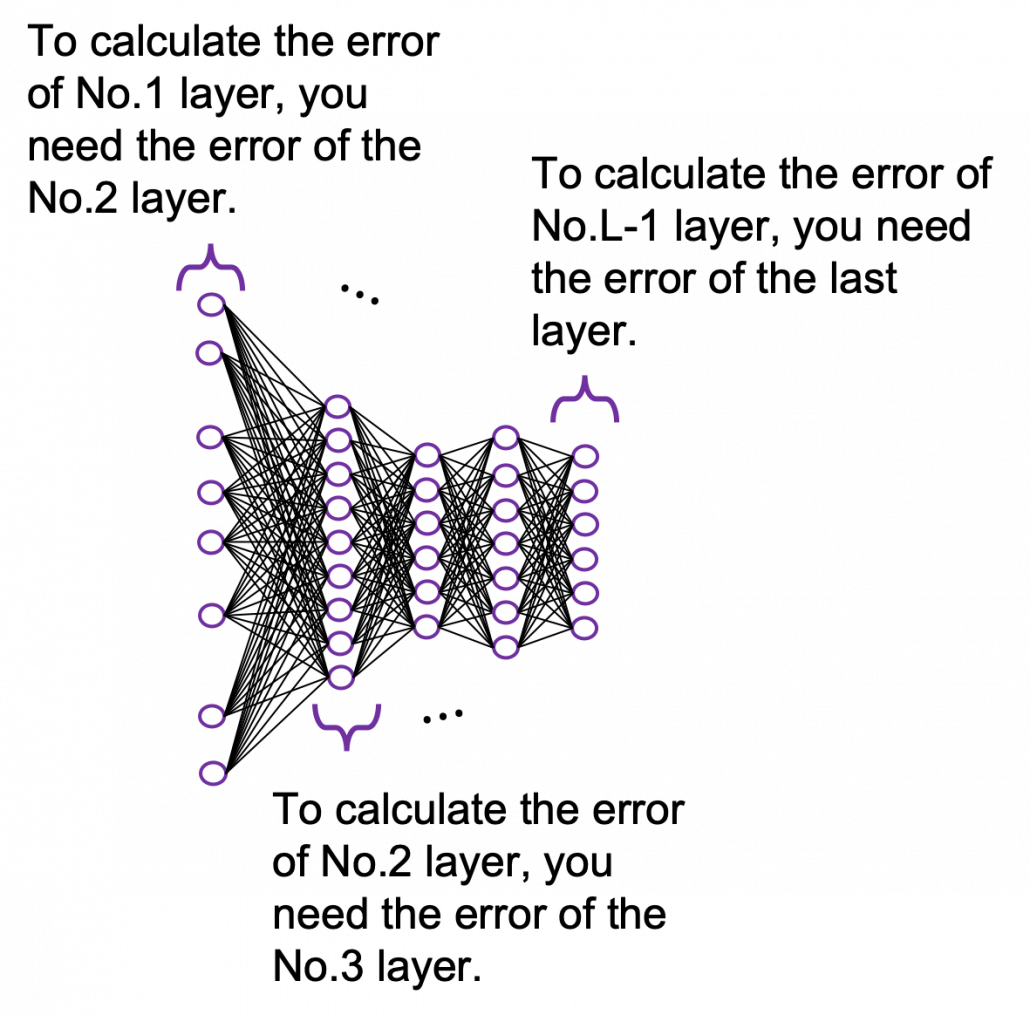
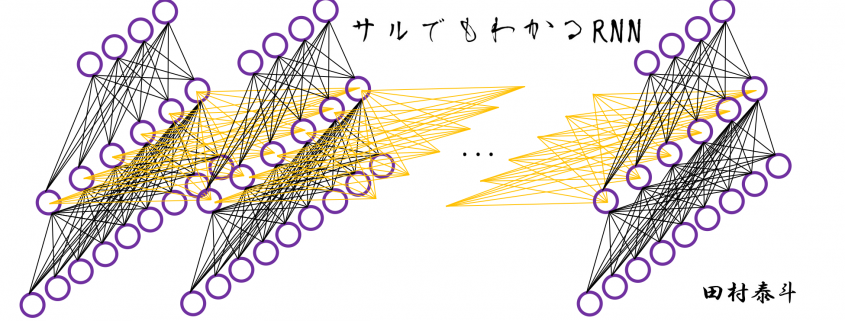
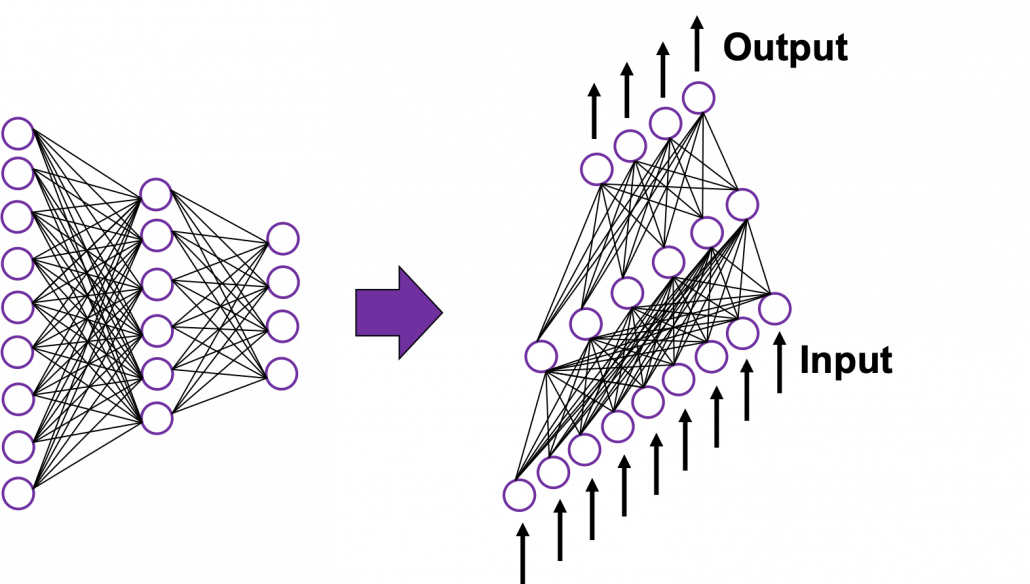 In fact the simple RNN which we are going to look at in this article has only three layers. From now on imagine that inputs of RNN come from the bottom and outputs go up. But RNNs have to keep information of earlier times steps during upcoming several time steps because as I mentioned in the last article RNNs are used for sequence data, the order of whose elements is important. In order to do that, information of the neurons in the middle layer of RNN propagate forward to the middle layer itself. Therefore in one time step of forward propagation of RNN, the input at the time step propagates forward as normal DCL, and the RNN gives out an output at the time step. And information of one neuron in the middle layer propagate forward to the other neurons like yellow arrows in the figure. And the information in the next neuron propagate forward to the other neurons, and this process is repeated. This is called recurrent connections of RNN.
In fact the simple RNN which we are going to look at in this article has only three layers. From now on imagine that inputs of RNN come from the bottom and outputs go up. But RNNs have to keep information of earlier times steps during upcoming several time steps because as I mentioned in the last article RNNs are used for sequence data, the order of whose elements is important. In order to do that, information of the neurons in the middle layer of RNN propagate forward to the middle layer itself. Therefore in one time step of forward propagation of RNN, the input at the time step propagates forward as normal DCL, and the RNN gives out an output at the time step. And information of one neuron in the middle layer propagate forward to the other neurons like yellow arrows in the figure. And the information in the next neuron propagate forward to the other neurons, and this process is repeated. This is called recurrent connections of RNN.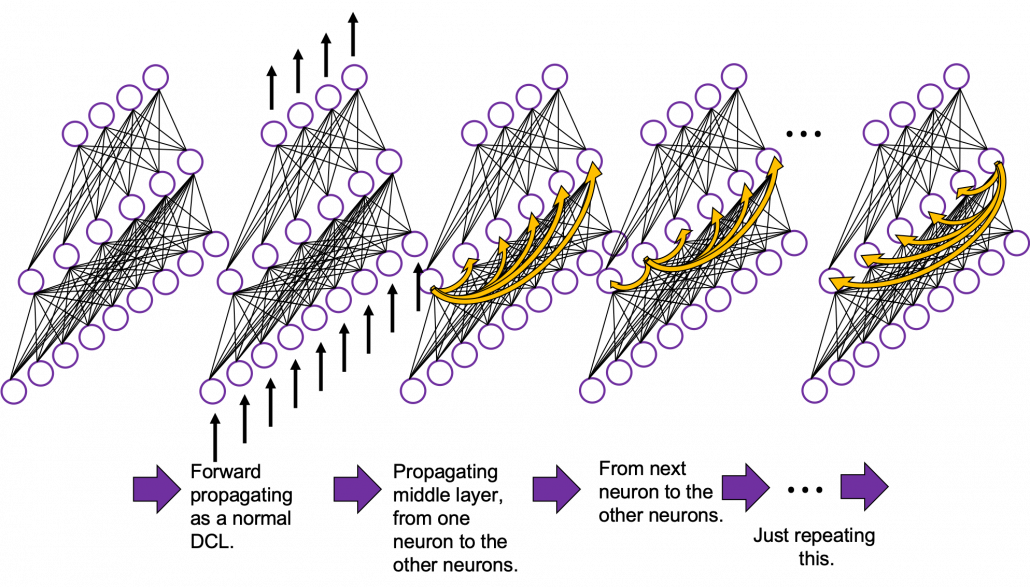
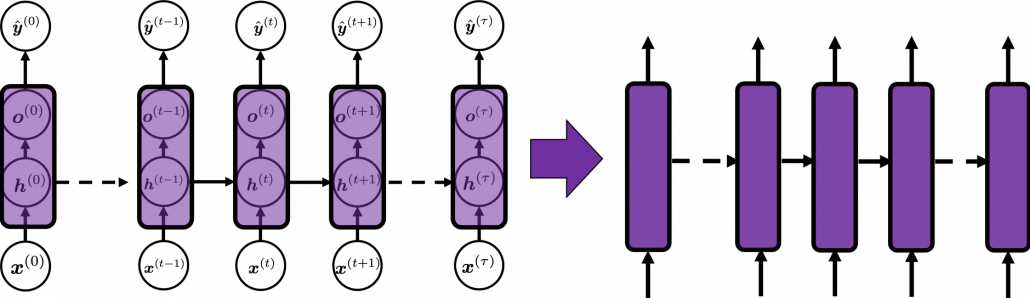
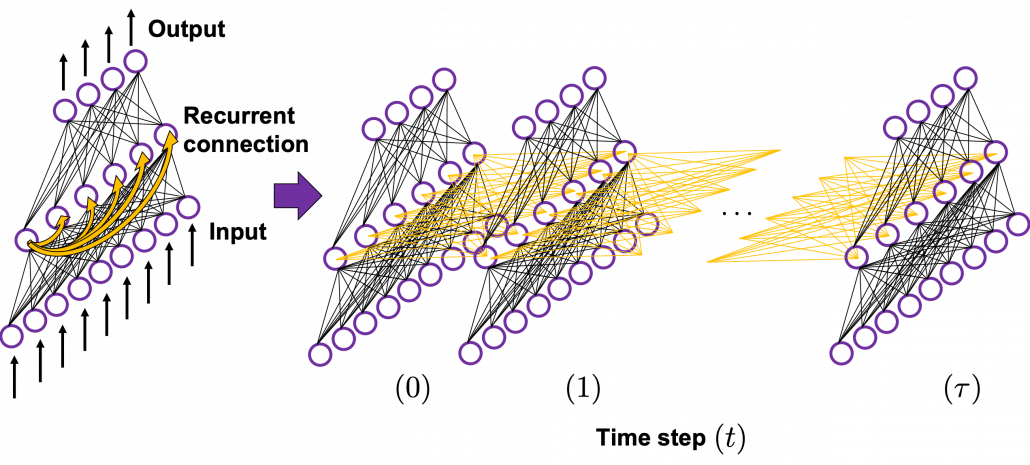 In many situations, RNNs are simplified as below. If you have read through this article until this point, I bet you gained some better understanding of RNNs, so you should little by little get used to this more abstract, blackboxed way of showing RNN.
In many situations, RNNs are simplified as below. If you have read through this article until this point, I bet you gained some better understanding of RNNs, so you should little by little get used to this more abstract, blackboxed way of showing RNN.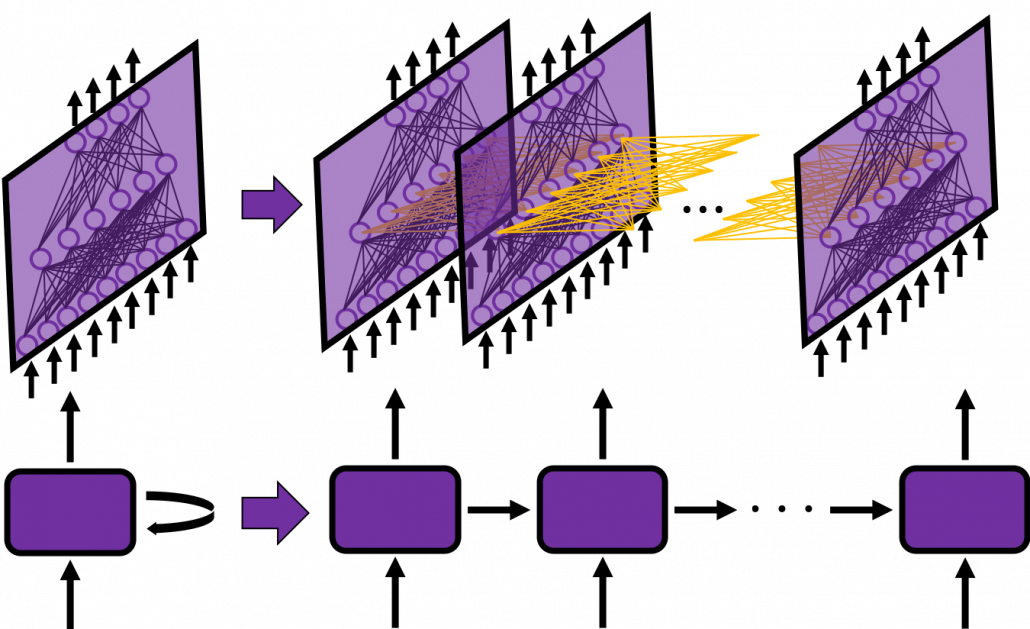
 .
.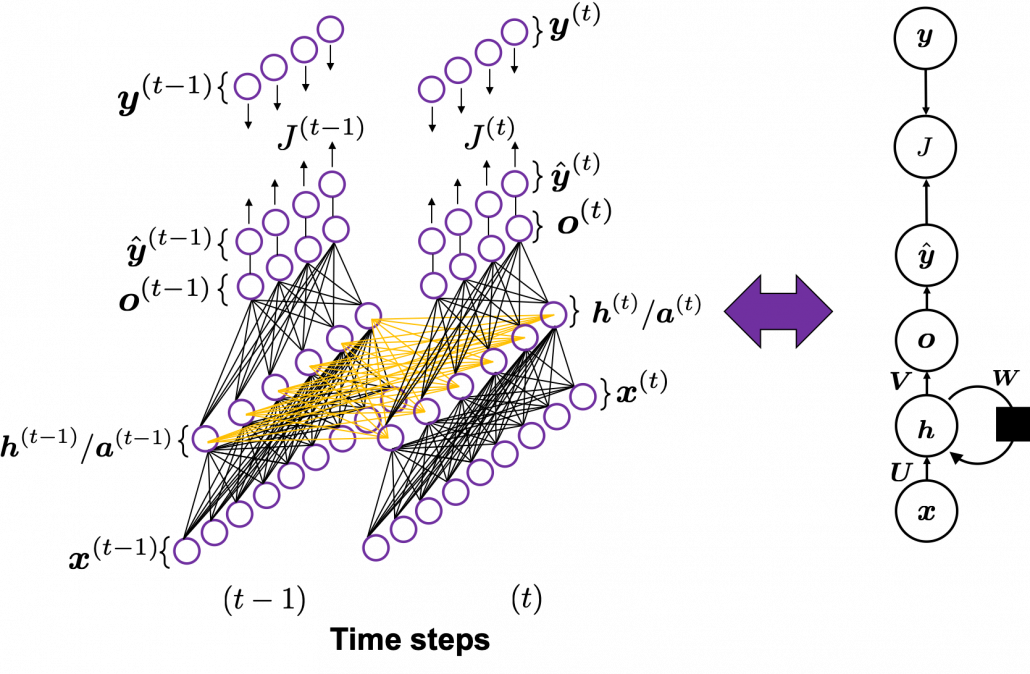
 at time step
at time step propagate forward as a normal DCL, and gives out the output
propagate forward as a normal DCL, and gives out the output  (The notation on the
(The notation on the  is called “hat,” and it means that the value is an estimated value. Whatever machine learning tasks you work on, the outputs of the functions are just estimations of ideal outcomes. You need to adjust parameters for better estimations. You should always be careful whether it is an actual value or an estimated value in the context of machine learning or statistics). But the most important parts are the middle layers.
is called “hat,” and it means that the value is an estimated value. Whatever machine learning tasks you work on, the outputs of the functions are just estimations of ideal outcomes. You need to adjust parameters for better estimations. You should always be careful whether it is an actual value or an estimated value in the context of machine learning or statistics). But the most important parts are the middle layers.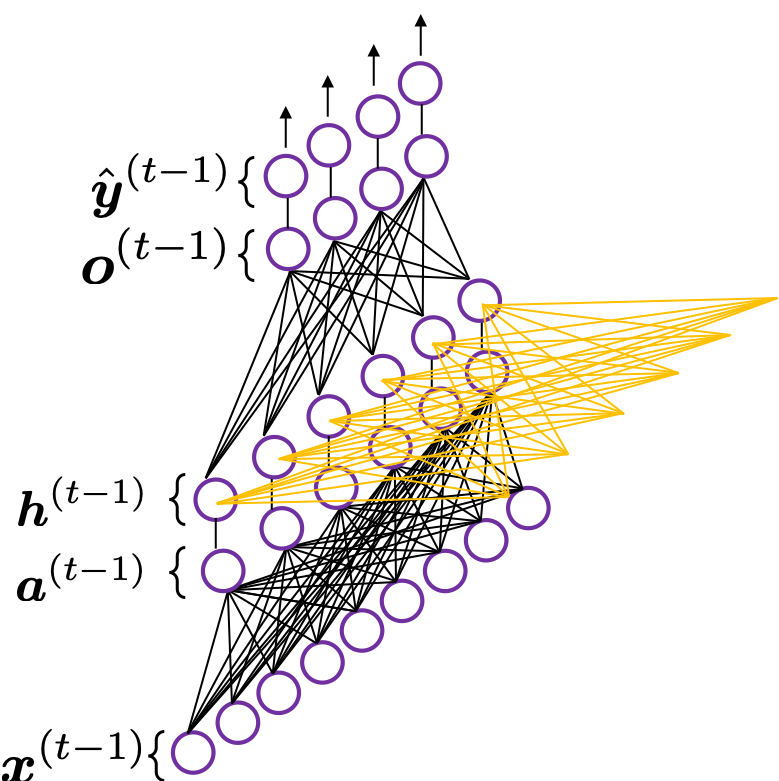
 is just linear summations of
is just linear summations of  (If you do not know what “linear summations” mean, please scroll this page a bit), and
(If you do not know what “linear summations” mean, please scroll this page a bit), and  is a combination of activated values of
is a combination of activated values of  from the last time step, with recurrent connections. The values of
from the last time step, with recurrent connections. The values of  , and the other is recurrent connections to
, and the other is recurrent connections to  .
.



 , and weights
, and weights  , then
, then  is a linear summation of
is a linear summation of  .
. and
and  is a linear summations all the elements of
is a linear summations all the elements of  , and
, and 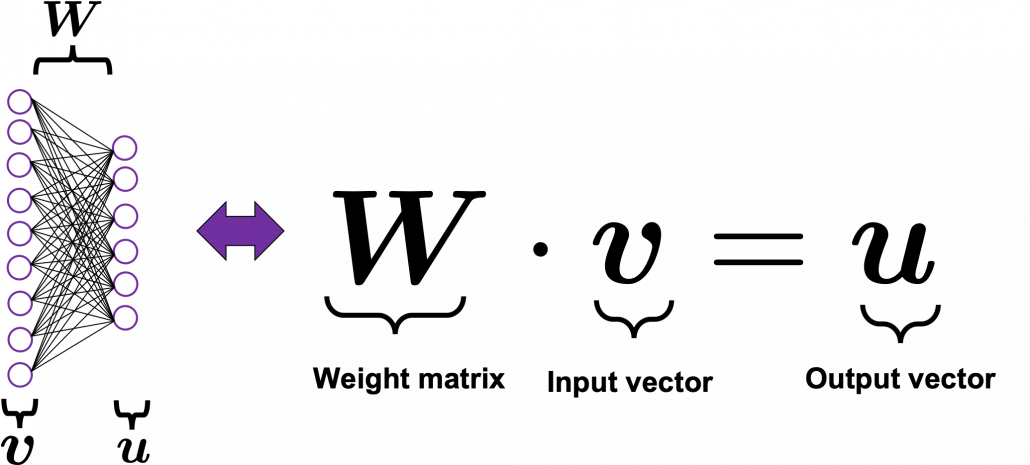
 , at every time step.
, at every time step. 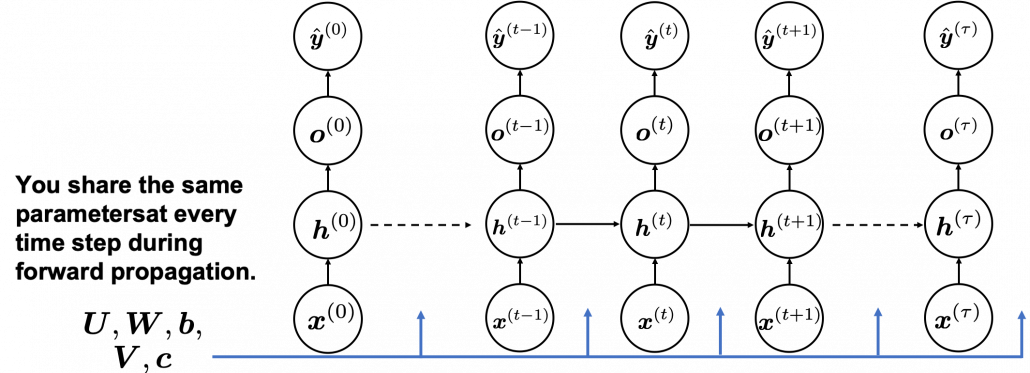
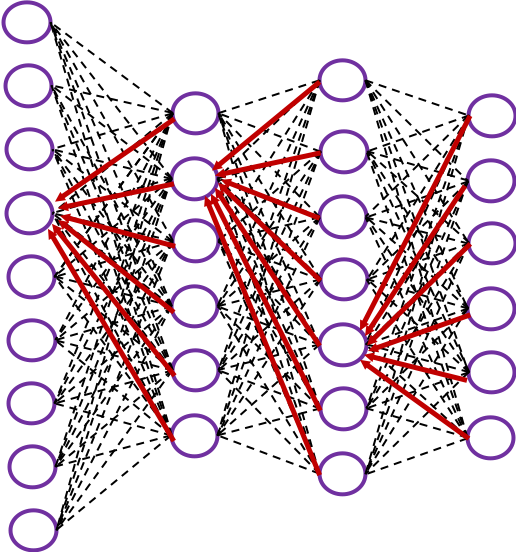
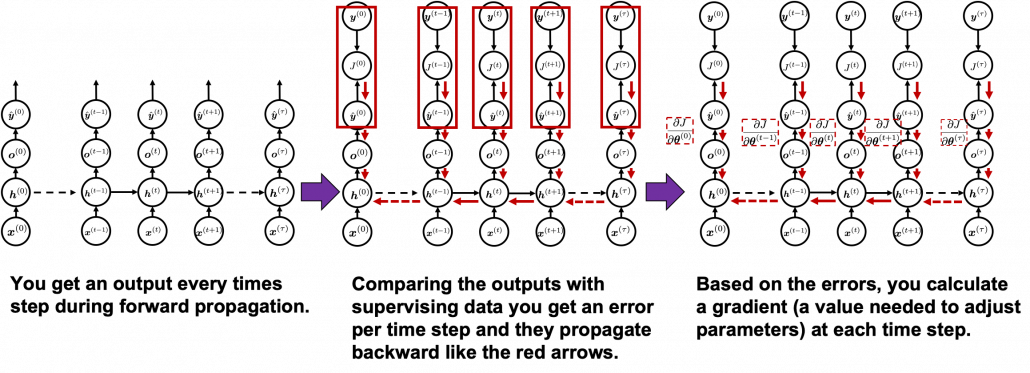 You need all the gradients to adjust parameters, but you do not necessarily need all the errors to calculate those gradients. Gradients in the context of machine learning mean partial derivatives of error functions (in this case
You need all the gradients to adjust parameters, but you do not necessarily need all the errors to calculate those gradients. Gradients in the context of machine learning mean partial derivatives of error functions (in this case  ) with respect to certain parameters, and mathematically a gradient of
) with respect to certain parameters, and mathematically a gradient of  is denoted as
is denoted as  . And another confusing point in many textbooks, including the MIT one, is that they give an impression that parameters depend on time steps. For example some study materials use notations like
. And another confusing point in many textbooks, including the MIT one, is that they give an impression that parameters depend on time steps. For example some study materials use notations like  , and I think this gives an impression that this is a gradient with respect to the parameters at time step
, and I think this gives an impression that this is a gradient with respect to the parameters at time step  . In my opinion this gradient rather should be written as
. In my opinion this gradient rather should be written as  . But many study materials denote gradients of those errors in the former way, so from now on let me use the notations which you can see in the figures in this article.
. But many study materials denote gradients of those errors in the former way, so from now on let me use the notations which you can see in the figures in this article. you need errors from time steps
you need errors from time steps  (as you can see in the figure, in order to calculate a gradient in a colored frame, you need all the errors in the same color).
(as you can see in the figure, in order to calculate a gradient in a colored frame, you need all the errors in the same color).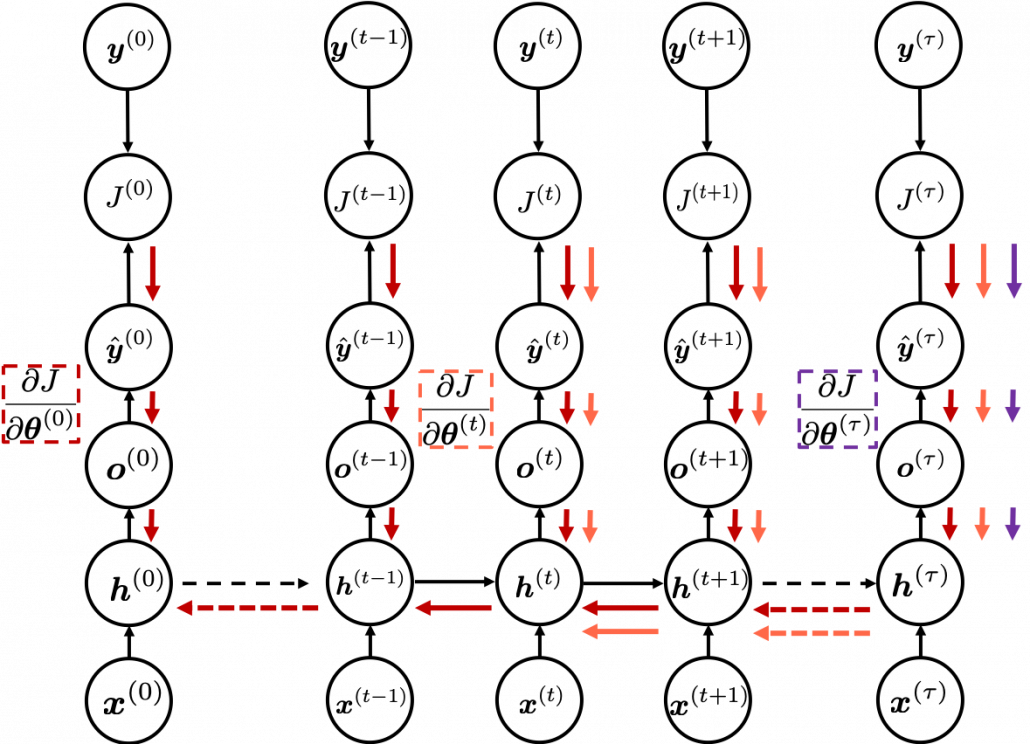
 different colors to show the whole process of RNN backprop, but that is not realistic. In the figure I displayed only the flows of errors necessary for calculating each gradient at time step
different colors to show the whole process of RNN backprop, but that is not realistic. In the figure I displayed only the flows of errors necessary for calculating each gradient at time step  .
. are correct notations, because
are correct notations, because  are values of neurons after forward propagation. They depend on time steps, and these are very values which I have been calling “errors.” That is why parameters do not depend on time steps, whereas errors depend on time steps.
are values of neurons after forward propagation. They depend on time steps, and these are very values which I have been calling “errors.” That is why parameters do not depend on time steps, whereas errors depend on time steps. . With this gradient
. With this gradient  , you can finally renew the value of
, you can finally renew the value of  one time.
one time.